astar_path_planner.hpp File Reference
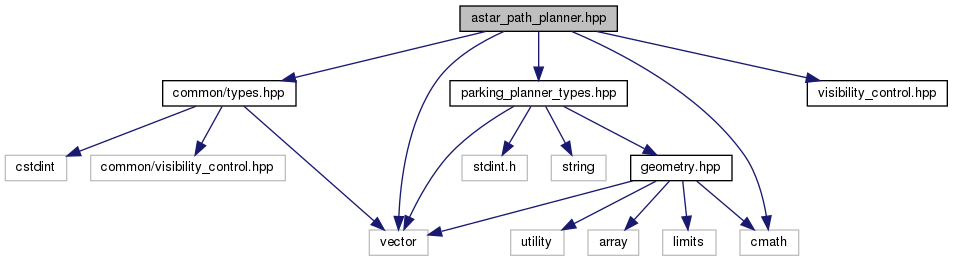
#include <common/types.hpp>#include <cmath>#include <vector>#include "parking_planner_types.hpp"#include "visibility_control.hpp"
Include dependency graph for astar_path_planner.hpp:
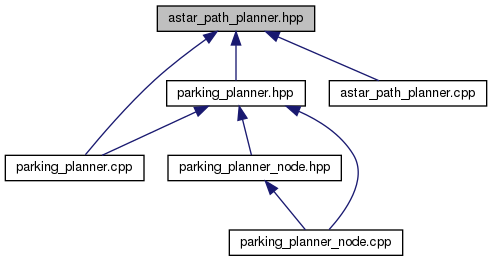
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::motion::planning::parking_planner::AstarPathPlanner |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::motion | |
| This namespace is for motion planning, motion models, and related functionality. | |
| autoware::motion::planning | |
| autoware::motion::planning::parking_planner | |
| Classes and functionality for planning parking maneuvers. | |
Variables | |
| static constexpr float64_t | autoware::motion::planning::parking_planner::MY_PI = 3.141592653589793 |
| static constexpr float64_t | autoware::motion::planning::parking_planner::DELTA_LONGITUDINAL = 0.125 |
| static const float64_t | autoware::motion::planning::parking_planner::DELTA_HEADING = MY_PI / 24.0 |
| static constexpr float64_t | autoware::motion::planning::parking_planner::MAX_EXPLORATION_RADIUS = 30.0 |
| static constexpr size_t | autoware::motion::planning::parking_planner::MAX_NUM_EXPLORATION_NODES = 1000000 |