convert.hpp File Reference
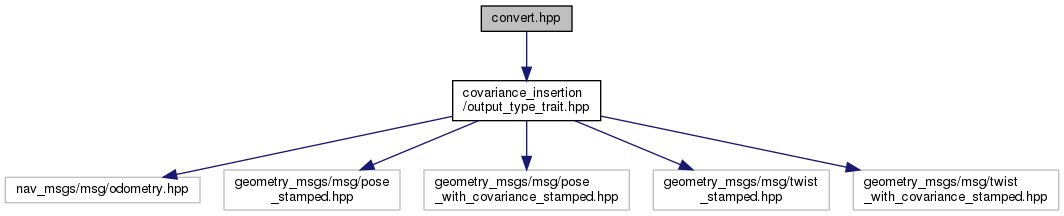
#include <covariance_insertion/output_type_trait.hpp>
Include dependency graph for convert.hpp:
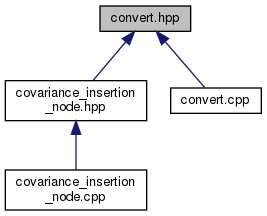
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::covariance_insertion_nodes | |
Functions | |
| template<typename InputT > | |
| constexpr output< InputT >::type | autoware::covariance_insertion_nodes::convert (const InputT &input_msg) noexcept |
| template<> | |
| geometry_msgs::msg::PoseWithCovariance | autoware::covariance_insertion_nodes::convert (const geometry_msgs::msg::Pose &input_msg) noexcept |
| template<> | |
| geometry_msgs::msg::TwistWithCovariance | autoware::covariance_insertion_nodes::convert (const geometry_msgs::msg::Twist &input_msg) noexcept |
| template<> | |
| geometry_msgs::msg::PoseWithCovarianceStamped | autoware::covariance_insertion_nodes::convert (const geometry_msgs::msg::PoseStamped &input_msg) noexcept |
| template<> | |
| geometry_msgs::msg::TwistWithCovarianceStamped | autoware::covariance_insertion_nodes::convert (const geometry_msgs::msg::TwistStamped &input_msg) noexcept |