Table of Contents
Ndt EKF smooth localization
This demo aims to show Kalman filter smoothing on top of NDT localization. The pose messages from NDT get a covariance assigned, then get passed into the Kalman filter node. The smooth output is then published as an Odometry topic and visualized in rviz2. This demo is tested with the Lexus car in LG simulator on the parking lot map.
Before running the demo, ensure that the simulator is running:
Start simulation as described in LGSVL simulator. Additionally, to configure LGSVL for this demonstration:
- Maps: use this map link
- Vehicles: Select
ROS2 nativebridge type and paste the content ofAutowareAuto/lgsvl-sensors.jsoninto theSensorstext box - Simulations: In
Generaltab,Select Cluster = Local Machineand untick any boxes. InMap & Vehiclestab, ensure to untickRun simulation in interactive mode. InTraffictab, untick all selection. TheWeathertab is irrelevant.
Then, run the demo as follows:
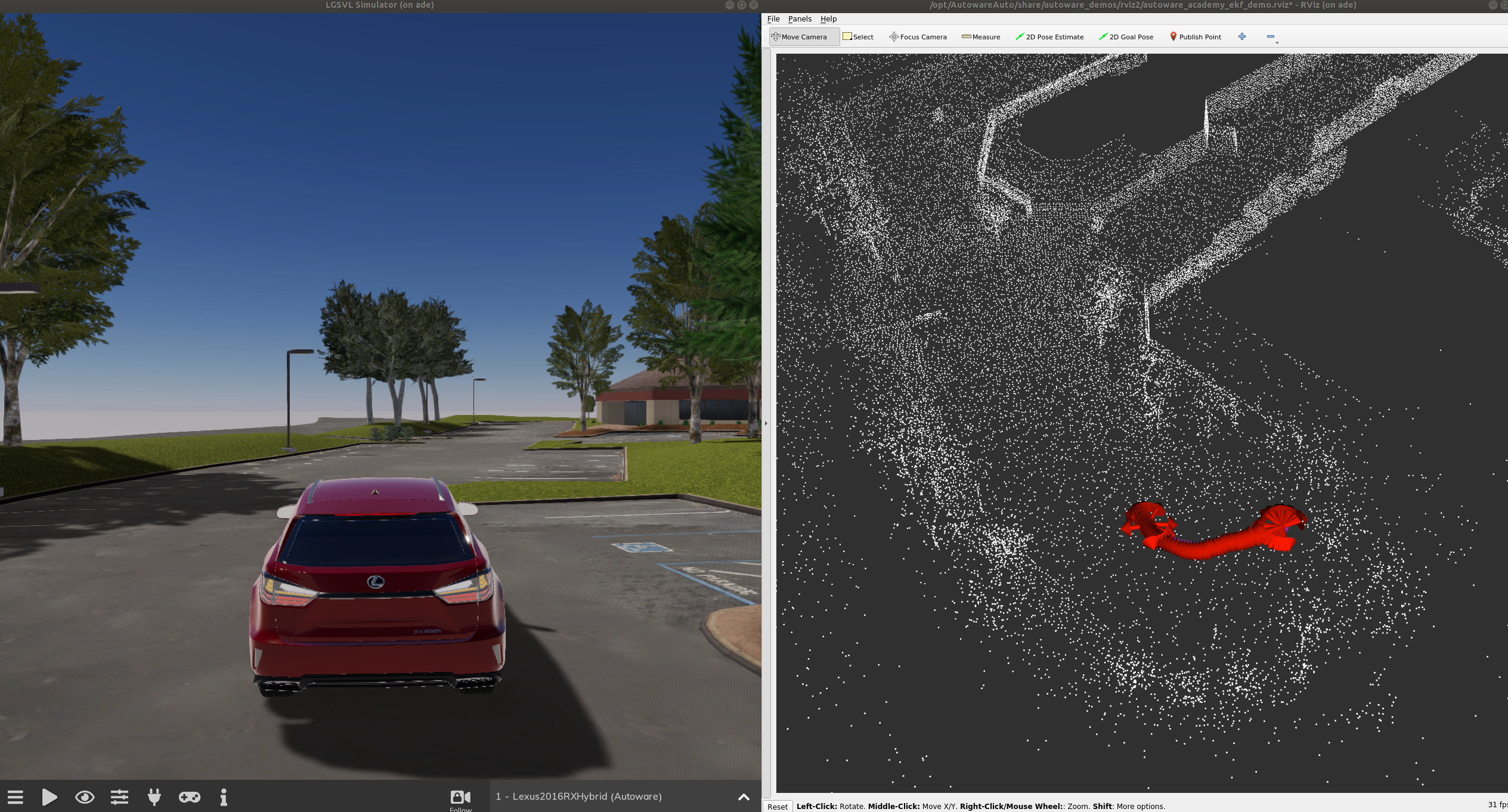
The localization module will automatically locate the vehicle in the parking lot. You can use the controls to move the vehicle in the simulator and observe the red arrow move in tandem. For information about the control refer to Starting the simulation. The following image shows the simulation working as expected: