lanelet2_map_provider_node.hpp File Reference
This file defines the lanelet2_map_provider_node class. More...
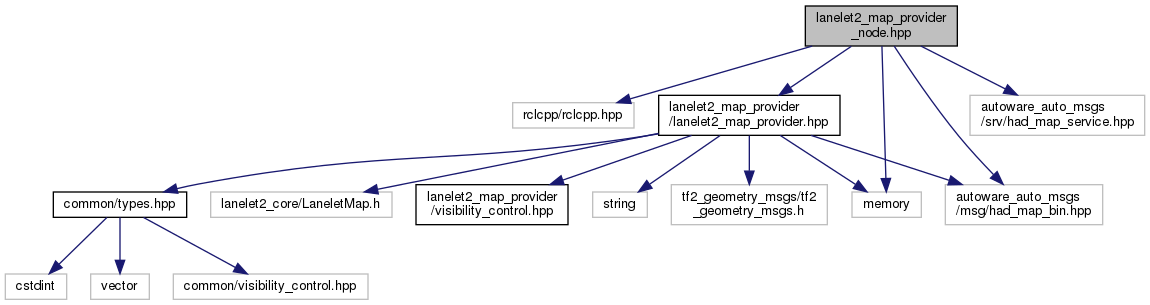
#include <rclcpp/rclcpp.hpp>#include <lanelet2_map_provider/lanelet2_map_provider.hpp>#include <memory>#include "autoware_auto_msgs/srv/had_map_service.hpp"#include "autoware_auto_msgs/msg/had_map_bin.hpp"
Include dependency graph for lanelet2_map_provider_node.hpp:
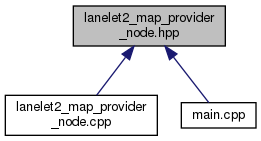
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::lanelet2_map_provider::Lanelet2MapProviderNode |
| ROS 2 Node for semantic map provider using lanelet2 map format. Node loads a lanelet2 OSM format map using the class Lanelet2MapProvider and then runs a service for supplying other nodes map information according to their requests. Requests are defined by a sequences of requested primitives as well as geometric bounds on requested map data. More... | |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::lanelet2_map_provider | |
| TODO(simon.thompson): Document namespaces! | |
Detailed Description
This file defines the lanelet2_map_provider_node class.
- Copyright
- Copyright 2020 The Autoware Foundation