mpc_controller.hpp File Reference
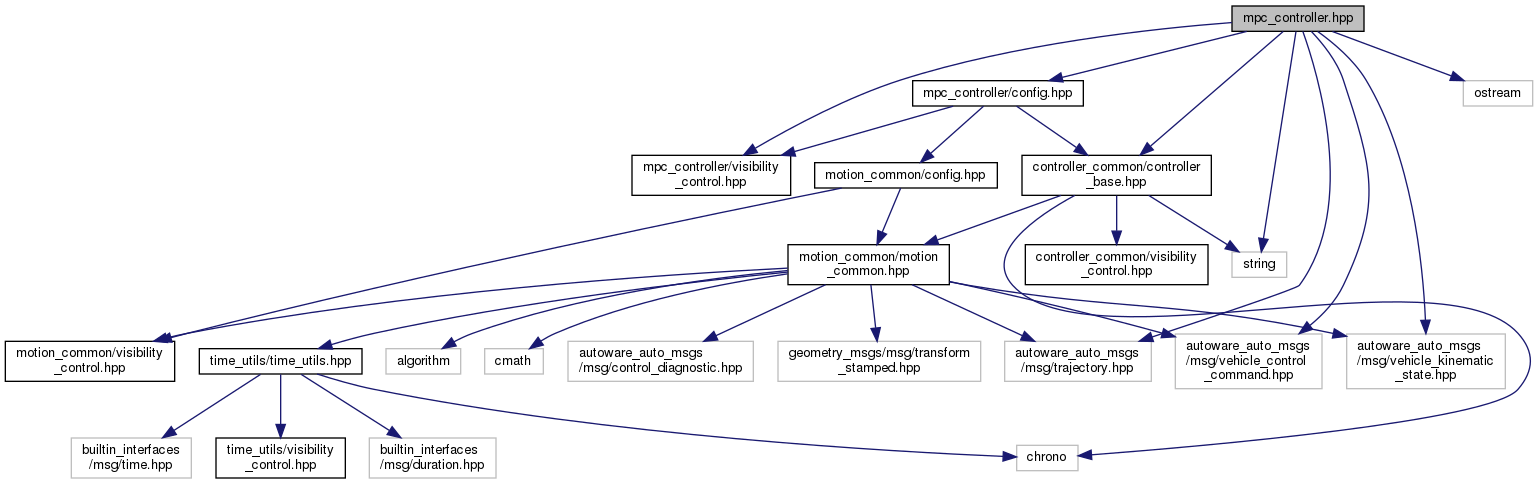
#include <mpc_controller/visibility_control.hpp>#include <autoware_auto_msgs/msg/trajectory.hpp>#include <autoware_auto_msgs/msg/vehicle_control_command.hpp>#include <autoware_auto_msgs/msg/vehicle_kinematic_state.hpp>#include <controller_common/controller_base.hpp>#include <mpc_controller/config.hpp>#include <ostream>#include <string>
Include dependency graph for mpc_controller.hpp:
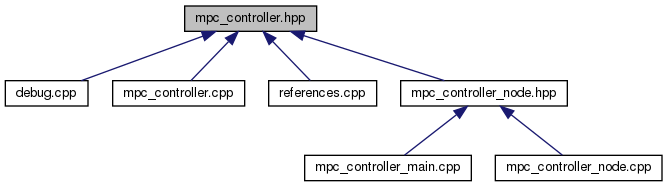
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | motion::control::mpc_controller::MpcController |
| A wrapper around an autogenerated mpc solver for vehicle dynamics control. More... | |
Namespaces | |
| motion | |
| motion::control | |
| motion::control::mpc_controller | |