ndt_map.hpp File Reference
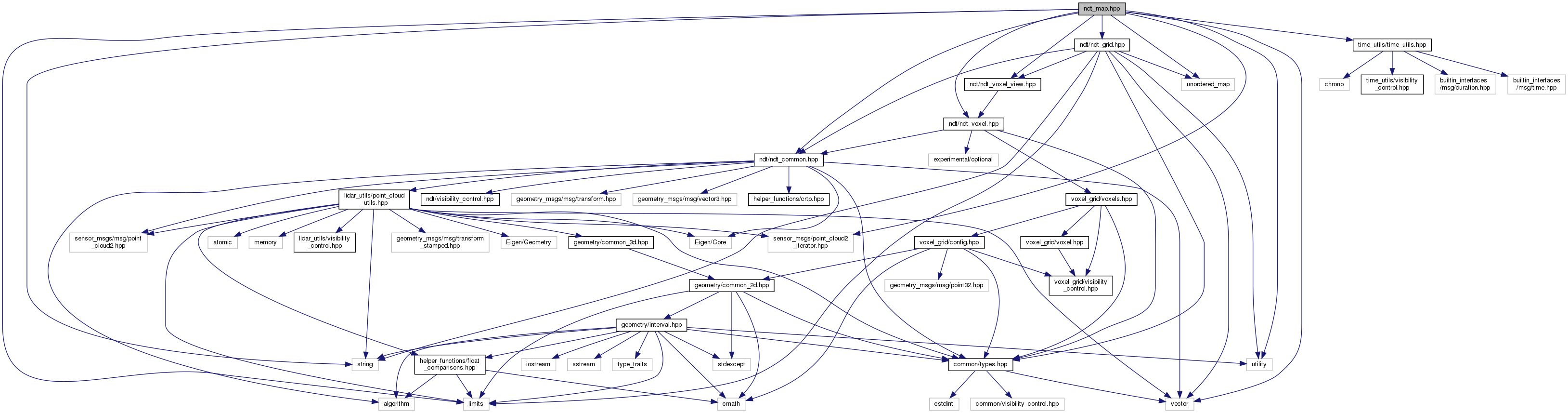
#include <ndt/ndt_common.hpp>#include <ndt/ndt_voxel.hpp>#include <ndt/ndt_voxel_view.hpp>#include <ndt/ndt_grid.hpp>#include <sensor_msgs/point_cloud2_iterator.hpp>#include <time_utils/time_utils.hpp>#include <vector>#include <limits>#include <unordered_map>#include <utility>#include <string>
Include dependency graph for ndt_map.hpp:
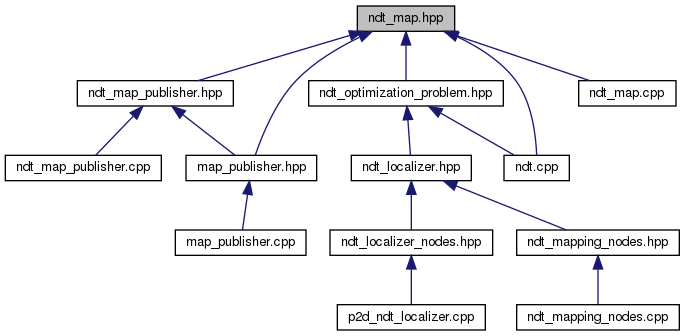
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::localization::ndt::DynamicNDTMap |
| class | autoware::localization::ndt::StaticNDTMap |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::localization | |
| autoware::localization::ndt | |
Functions | |
| uint32_t NDT_PUBLIC | autoware::localization::ndt::validate_pcl_map (const sensor_msgs::msg::PointCloud2 &msg) |