references.cpp File Reference
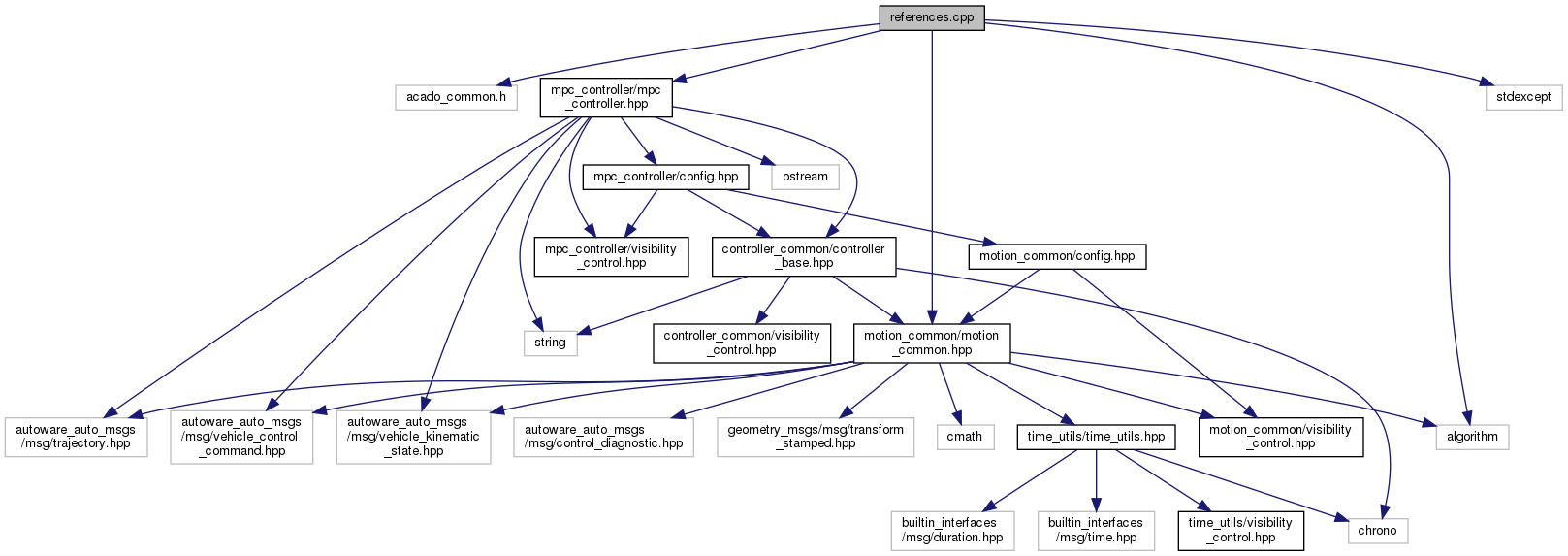
#include <acado_common.h>#include <motion_common/motion_common.hpp>#include <algorithm>#include <stdexcept>#include "mpc_controller/mpc_controller.hpp"
Include dependency graph for references.cpp:
Namespaces | |
| motion | |
| motion::control | |
| motion::control::mpc_controller | |
Variables | |
| constexpr auto | motion::control::mpc_controller::NYN = static_cast<std::size_t>(ACADO_NYN) |
| constexpr auto | motion::control::mpc_controller::IDYN_X = 0U |
| constexpr auto | motion::control::mpc_controller::IDYN_Y = 1U |
| constexpr auto | motion::control::mpc_controller::IDYN_HEADING = 2U |
| constexpr auto | motion::control::mpc_controller::IDYN_VEL_LONG = 3U |
| constexpr auto | motion::control::mpc_controller::NY = static_cast<std::size_t>(ACADO_NY) |
| constexpr auto | motion::control::mpc_controller::IDY_X = 0U |
| constexpr auto | motion::control::mpc_controller::IDY_Y = 1U |
| constexpr auto | motion::control::mpc_controller::IDY_HEADING = 2U |
| constexpr auto | motion::control::mpc_controller::IDY_VEL_LONG = 3U |
| constexpr auto | motion::control::mpc_controller::IDY_ACC = 4U |
| constexpr auto | motion::control::mpc_controller::IDY_STEER = 5U |