rungekutta.hpp File Reference
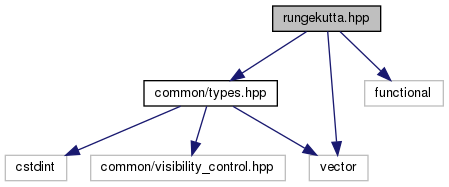
Include dependency graph for rungekutta.hpp:
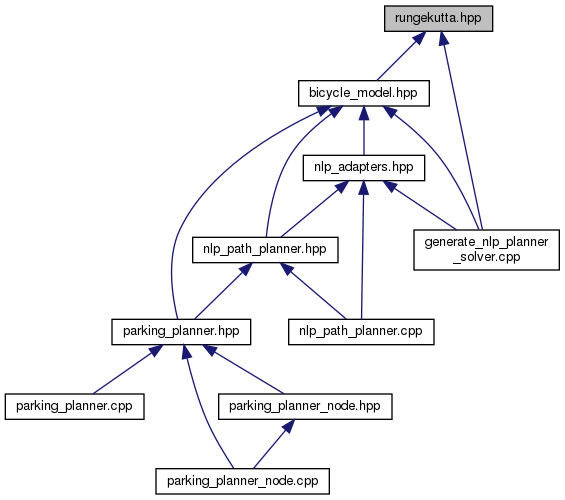
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::motion | |
| This namespace is for motion planning, motion models, and related functionality. | |
| autoware::motion::planning | |
| autoware::motion::planning::parking_planner | |
| Classes and functionality for planning parking maneuvers. | |
Functions | |
| template<typename T > | |
| std::vector< T > | autoware::motion::planning::parking_planner::operator+ (const std::vector< T > &vector1, const std::vector< T > &vector2) |
| template<typename T > | |
| std::vector< T > | autoware::motion::planning::parking_planner::operator* (const T &scalar, const std::vector< T > &vector) |
| template<class X , class U , typename P > | |
| X | autoware::motion::planning::parking_planner::RK4 (X x, U u, P p, std::function< X(X, U, P)> f, const float64_t stepsize, const std::size_t steps) |
| Template for an explicit Runge-Kutta integrator. CasADi has its own, but it for some reason doesn't compose with the IPOPT solver generator :shrug: More... | |
| template<class X , class U > | |
| X | autoware::motion::planning::parking_planner::RK4 (X x, U u, std::function< X(X, U)> f, const float64_t stepsize, const std::size_t steps) |