history.hpp File Reference
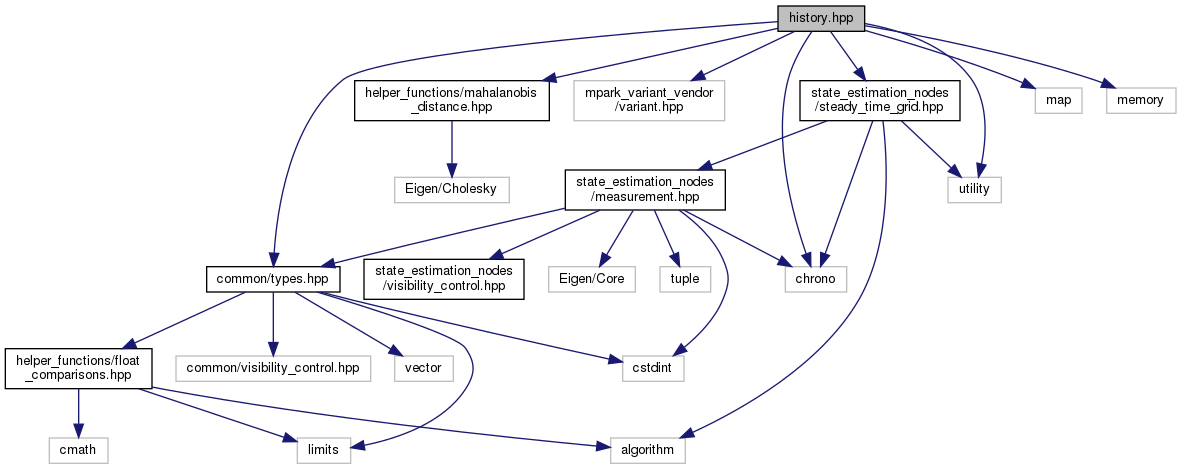
#include <common/types.hpp>#include <helper_functions/mahalanobis_distance.hpp>#include <mpark_variant_vendor/variant.hpp>#include <state_estimation_nodes/steady_time_grid.hpp>#include <chrono>#include <map>#include <memory>#include <utility>
Include dependency graph for history.hpp:
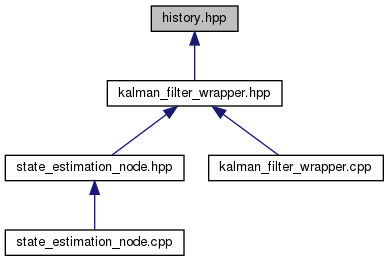
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | autoware::prediction::PredictionEvent |
| An event to indicate a prediction step. More... | |
| struct | autoware::prediction::ResetEvent< FilterT > |
| An event to reset the state of the filter. More... | |
| class | autoware::prediction::History< FilterT, kNumOfStates, EventT > |
| This class encapsulates a history of events used with EKF. More... | |
| class | autoware::prediction::History< FilterT, kNumOfStates, EventT >::HistoryEntry |
| class | autoware::prediction::History< FilterT, kNumOfStates, EventT >::EkfStateUpdater |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::prediction | |
| Functionality relating to prediction, including state estimation, kinematic prediction, maneuver-based prediction, map-aware prediction etc... | |
| autoware::prediction::detail | |
Functions | |
| template<std::int32_t kNumOfStates> | |
| bool | autoware::prediction::detail::passes_mahalanobis_gate (const Eigen::Matrix< common::types::float32_t, kNumOfStates, 1 > &sample, const Eigen::Matrix< common::types::float32_t, kNumOfStates, 1 > &mean, const Eigen::Matrix< common::types::float32_t, kNumOfStates, kNumOfStates > &covariance_factor, const common::types::float32_t mahalanobis_threshold) |