kalman_filter.hpp File Reference
This file defines a Kalman filter implementation of the filter interface. More...
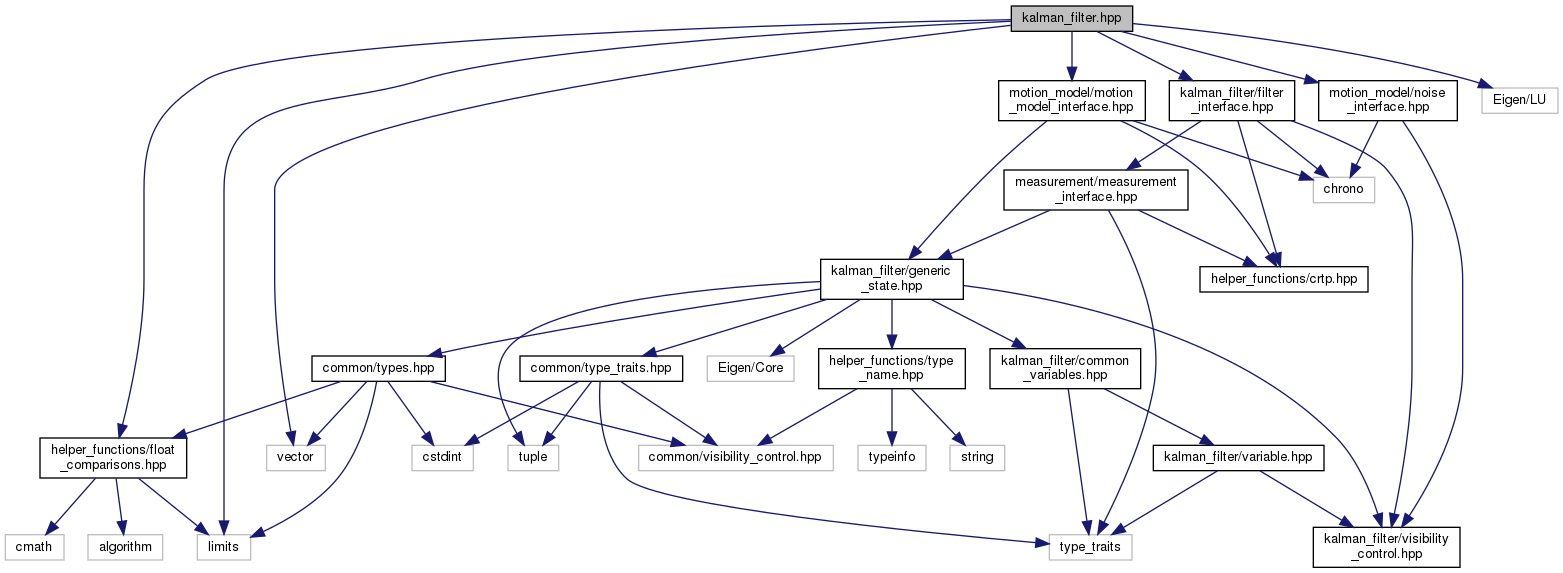
#include <helper_functions/float_comparisons.hpp>#include <kalman_filter/filter_interface.hpp>#include <motion_model/motion_model_interface.hpp>#include <motion_model/noise_interface.hpp>#include <Eigen/LU>#include <limits>#include <vector>
Include dependency graph for kalman_filter.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::prediction::KalmanFilter< MotionModelT, NoiseModelT > |
| A Kalman filter implementation. More... | |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::prediction | |
| Functionality relating to prediction, including state estimation, kinematic prediction, maneuver-based prediction, map-aware prediction etc... | |
Functions | |
| template<typename MotionModelT , typename NoiseModelT > | |
| auto | autoware::prediction::make_kalman_filter (const MotionModelT &motion_model, const NoiseModelT &noise_model, const typename MotionModelT::State &initial_state, const typename MotionModelT::State::Matrix &initial_covariance) |
| A utility function that creates a Kalman filter. More... | |
| template<typename MotionModelT , typename NoiseModelT > | |
| auto | autoware::prediction::make_kalman_filter (const MotionModelT &motion_model, const NoiseModelT &noise_model, const typename MotionModelT::State &initial_state, const std::vector< typename MotionModelT::State::Scalar > &initial_variances) |
| A utility function that creates a Kalman filter from a vector of variances. More... | |
Detailed Description
This file defines a Kalman filter implementation of the filter interface.
- Copyright
- Copyright 2021 the Autoware Foundation All rights reserved.