policies.hpp File Reference
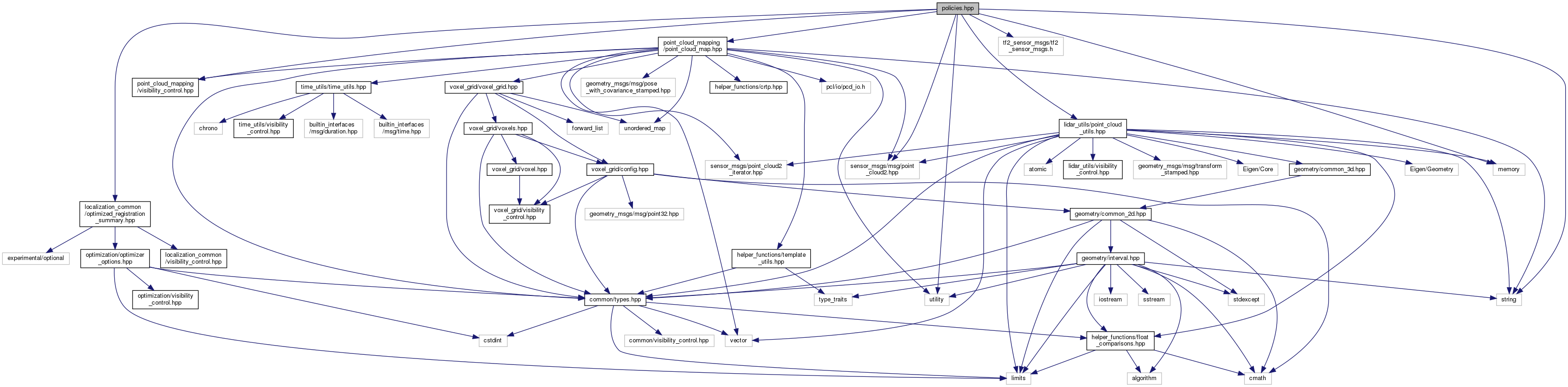
#include <point_cloud_mapping/visibility_control.hpp>#include <localization_common/optimized_registration_summary.hpp>#include <sensor_msgs/msg/point_cloud2.hpp>#include <point_cloud_mapping/point_cloud_map.hpp>#include <tf2_sensor_msgs/tf2_sensor_msgs.h>#include <lidar_utils/point_cloud_utils.hpp>#include <memory>#include <string>#include <utility>
Include dependency graph for policies.hpp:
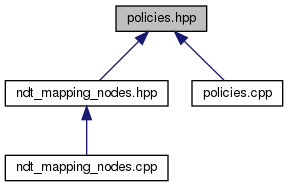
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::mapping::point_cloud_mapping::TriggerPolicyBase< Derived > |
| class | autoware::mapping::point_cloud_mapping::CapacityTrigger |
| Trigger map writing when map reaches its capacity. More... | |
| class | autoware::mapping::point_cloud_mapping::PrefixGeneratorBase< Derived > |
| class | autoware::mapping::point_cloud_mapping::TimeStampPrefixGenerator |
| Prefix generator that adds the current time stamp to the end of the base prefix. More... | |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::mapping | |
| autoware::mapping::point_cloud_mapping | |