trajectory_display.cpp File Reference
#include <planning/trajectory_display.hpp>#include <common/types.hpp>#include <memory>#include <string>#include <pluginlib/class_list_macros.hpp>
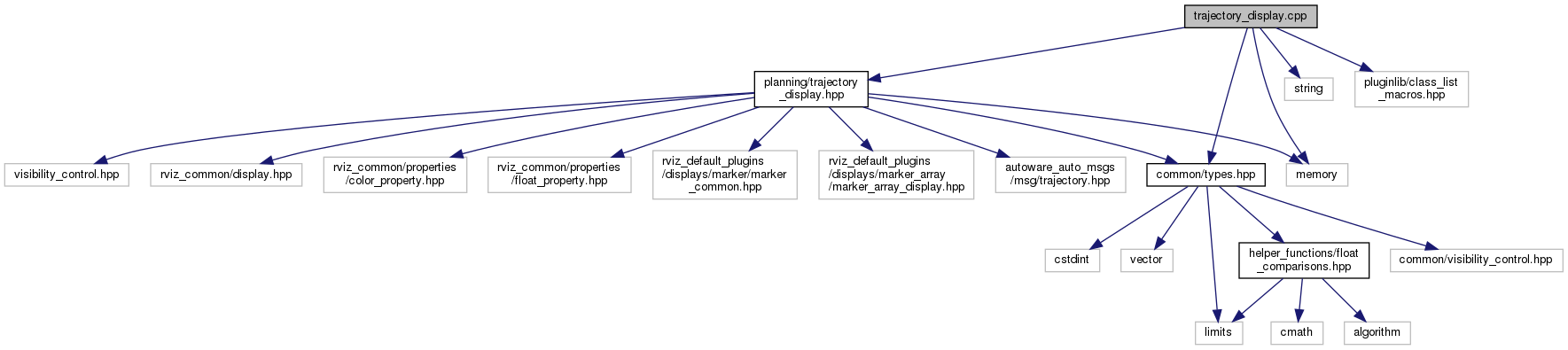
Include dependency graph for trajectory_display.cpp:
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::rviz_plugins | |