vlp32c_data.hpp File Reference
This file defines a driver for Velodyne LiDARs. More...
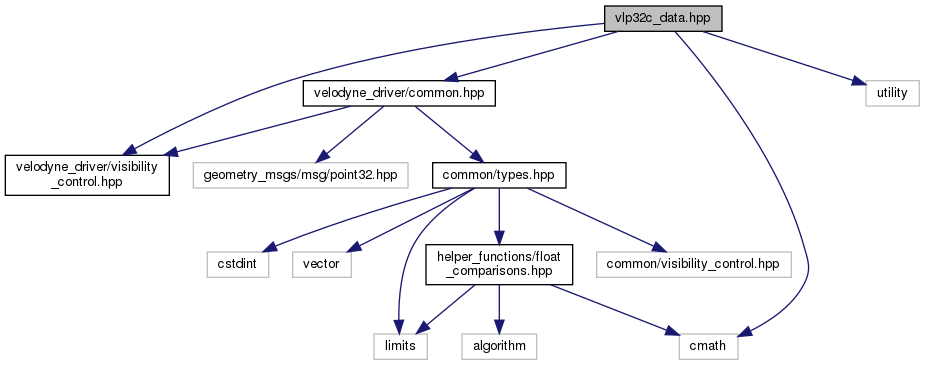
#include <velodyne_driver/visibility_control.hpp>#include <velodyne_driver/common.hpp>#include <cmath>#include <utility>
Include dependency graph for vlp32c_data.hpp:
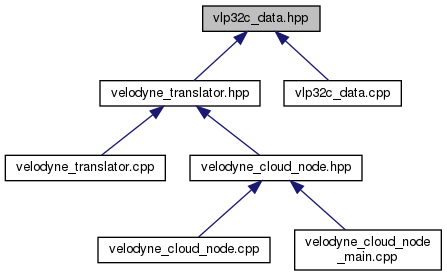
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::drivers::velodyne_driver::VLP32CData |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::drivers | |
| Libraries, ROS nodes, and other functionality relating to sensor drivers or actuation. | |
| autoware::drivers::velodyne_driver | |
| Classes, types, and definitions specifically relating to Velodyne LiDARs. In it's current incarnation, we consider Velodyne to be synonymous with LiDARs. In the future, this namespace will diverge to LiDAR and Velodyne for general LiDAR point cloud functionality, and specific driver functionality for velodne LiDARs respectively. | |
Detailed Description
This file defines a driver for Velodyne LiDARs.
- Copyright
- Copyright 2020 the Autoware Foundation