control/pure_pursuit/src/config.cpp File Reference
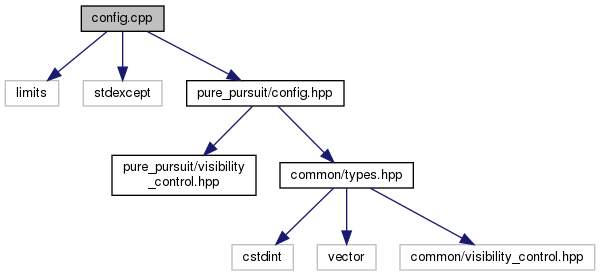
Include dependency graph for control/pure_pursuit/src/config.cpp:
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::motion | |
| This namespace is for motion planning, motion models, and related functionality. | |
| autoware::motion::control | |
| autoware::motion::control::pure_pursuit | |
| Resources relating to the pure pursuit package. | |