geometry.hpp File Reference
#include <vector>#include <array>#include <cmath>#include <limits>#include <utility>
Include dependency graph for geometry.hpp:
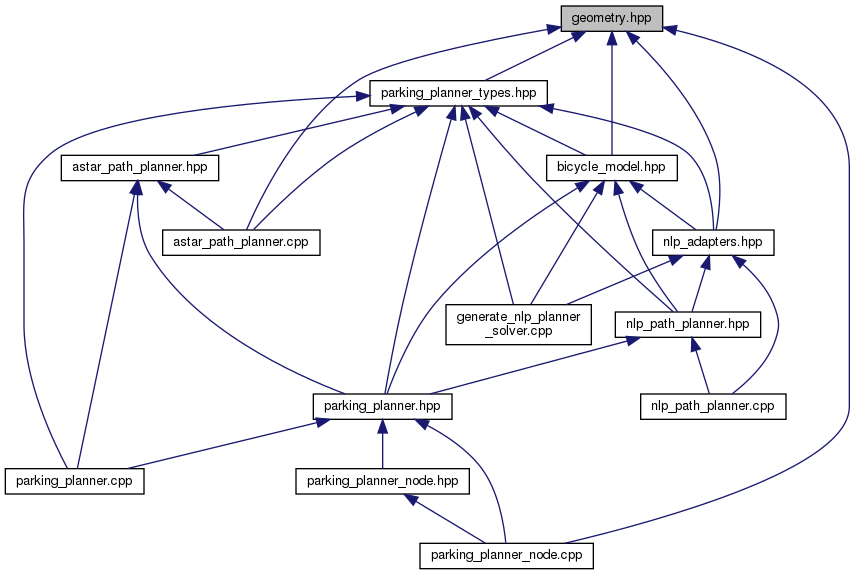
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::motion::planning::parking_planner::Point2D< T > |
| Class describing a point in two-dimensional space. More... | |
| class | autoware::motion::planning::parking_planner::Halfplane2D< T > |
| Class describing a halfplane in two-dimensional space. More... | |
| class | autoware::motion::planning::parking_planner::Polytope2D< T > |
| Class describing a polytope in two-dimensional space. More... | |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::motion | |
| This namespace is for motion planning, motion models, and related functionality. | |
| autoware::motion::planning | |
| autoware::motion::planning::parking_planner | |
| Classes and functionality for planning parking maneuvers. | |