shapes.hpp File Reference
This file defines the tracking_test_framework classes which are responsible for generating the 2D objects for unit testing tracking algorithms. More...
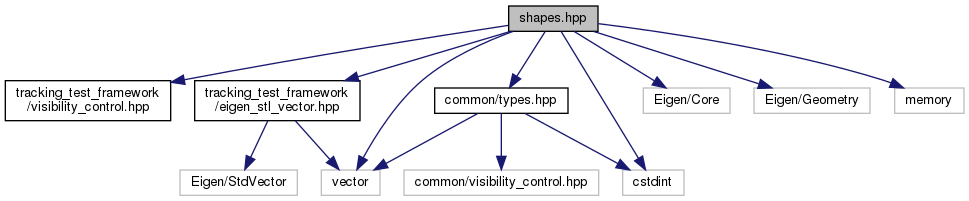
#include <tracking_test_framework/visibility_control.hpp>#include <tracking_test_framework/eigen_stl_vector.hpp>#include <common/types.hpp>#include <Eigen/Core>#include <Eigen/Geometry>#include <cstdint>#include <memory>#include <vector>
Include dependency graph for shapes.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::tracking_test_framework::Shape |
| This is the base class for the 2D shapes. More... | |
| class | autoware::tracking_test_framework::Line |
| This is the class which represents the line and defines the function intersect_with_line which gives the intersection points with another line. More... | |
| class | autoware::tracking_test_framework::Rectangle |
| This is the class which represents the cars as rectangles in 2D and defines the function intersect_with_line which gives the intersection points of the rectangle with the line. More... | |
| class | autoware::tracking_test_framework::Circle |
| This is the class which represents the pedestrians as circles in 2D and defines the function intersect_with_line which gives the intersection points of circle with a line. More... | |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::tracking_test_framework | |
Variables | |
| class TRACKING_TEST_FRAMEWORK_PUBLIC | autoware::tracking_test_framework::Line |
| Forward declaration of the Line class. More... | |
Detailed Description
This file defines the tracking_test_framework classes which are responsible for generating the 2D objects for unit testing tracking algorithms.
- Copyright
- Copyright 2021 The Autoware Foundation