tracked_object.hpp File Reference
This file defines the multi_object_tracking class. More...
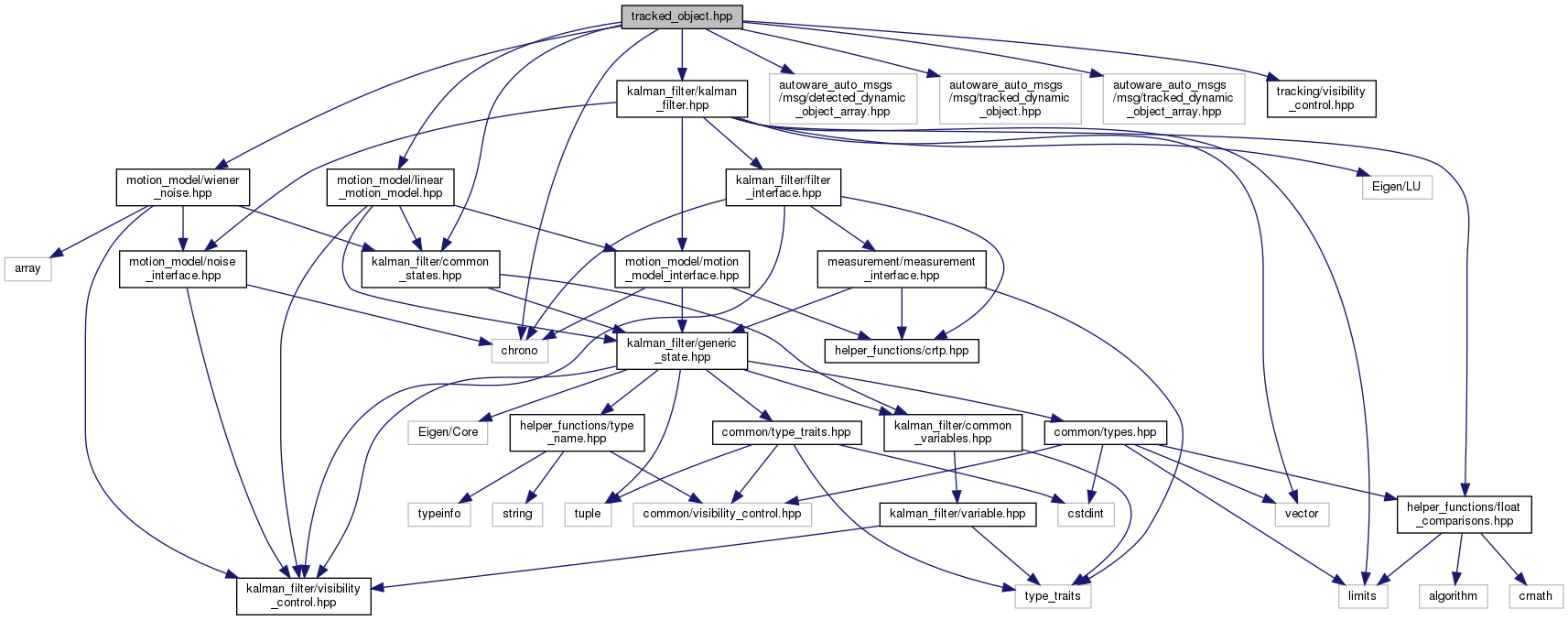
#include <chrono>#include "autoware_auto_msgs/msg/detected_dynamic_object_array.hpp"#include "autoware_auto_msgs/msg/tracked_dynamic_object.hpp"#include "autoware_auto_msgs/msg/tracked_dynamic_object_array.hpp"#include "kalman_filter/common_states.hpp"#include "kalman_filter/kalman_filter.hpp"#include "motion_model/linear_motion_model.hpp"#include "motion_model/wiener_noise.hpp"#include "tracking/visibility_control.hpp"
Include dependency graph for tracked_object.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::perception::tracking::TrackedObject |
| Internal class containing the object state and other information. More... | |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::perception | |
| Perception related algorithms and functionality, such as those acting on 3D lidar data, camera data, radar, or ultrasonic information. | |
| autoware::perception::tracking | |
Detailed Description
This file defines the multi_object_tracking class.
- Copyright
- Copyright 2021 The Autoware Foundation