euclidean_cluster.cpp File Reference
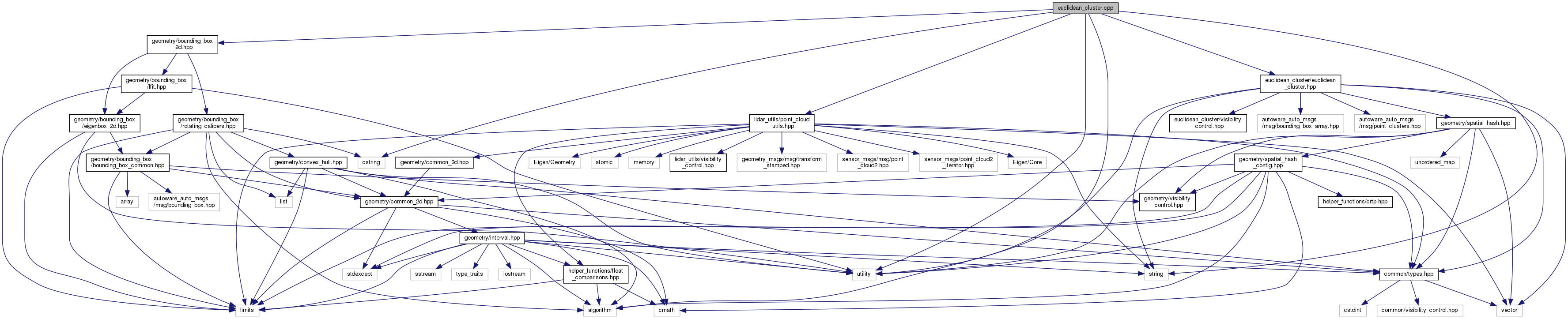
#include <lidar_utils/point_cloud_utils.hpp>#include <cstring>#include <algorithm>#include <string>#include <utility>#include "euclidean_cluster/euclidean_cluster.hpp"#include "geometry/bounding_box_2d.hpp"
Include dependency graph for euclidean_cluster.cpp:
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::perception | |
| Perception related algorithms and functionality, such as those acting on 3D lidar data, camera data, radar, or ultrasonic information. | |
| autoware::perception::segmentation | |
| autoware::perception::segmentation::euclidean_cluster | |
| Supporting classes for euclidean clustering, an object detection algorithm. | |
| autoware::perception::segmentation::euclidean_cluster::details | |
| Common euclidean cluster functions not intended for external use. | |