common_states.hpp File Reference
This file holds a collection of states that are commonly used in this package. More...
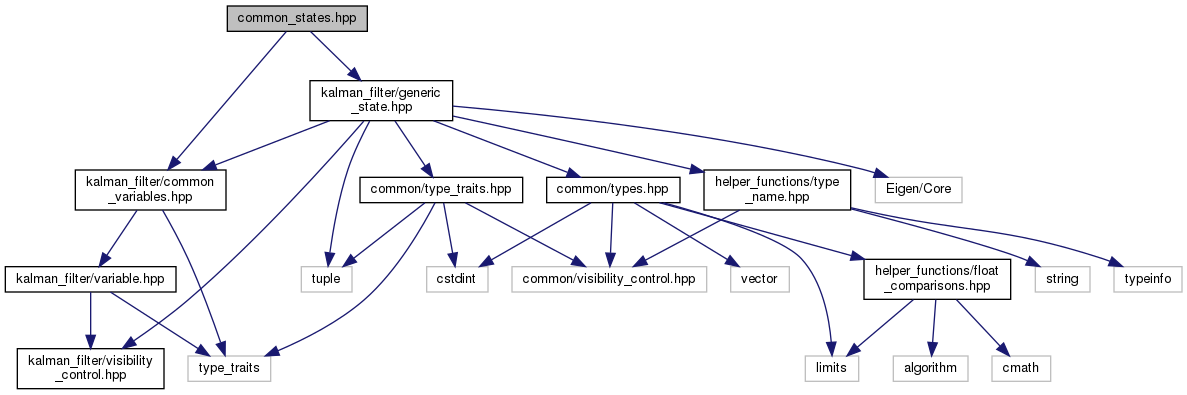
Include dependency graph for common_states.hpp:
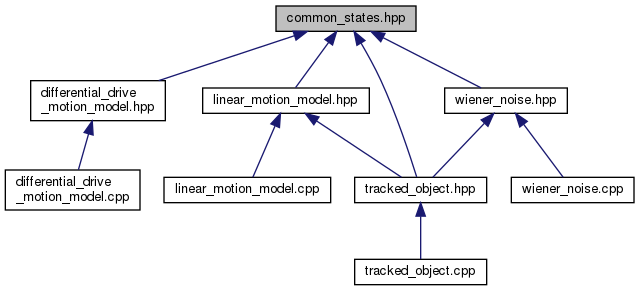
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::prediction | |
| Functionality relating to prediction, including state estimation, kinematic prediction, maneuver-based prediction, map-aware prediction etc... | |
| autoware::prediction::state | |
Typedefs | |
| using | autoware::prediction::state::ConstAccelerationXY = FloatState< variable::X, variable::X_VELOCITY, variable::X_ACCELERATION, variable::Y, variable::Y_VELOCITY, variable::Y_ACCELERATION > |
| A 2D state with no rotation. More... | |
| using | autoware::prediction::state::ConstAccelerationXYYaw = FloatState< variable::X, variable::X_VELOCITY, variable::X_ACCELERATION, variable::Y, variable::Y_VELOCITY, variable::Y_ACCELERATION, variable::YAW, variable::YAW_CHANGE_RATE, variable::YAW_CHANGE_ACCELERATION > |
| A 2D state with a CCW rotation. More... | |
| using | autoware::prediction::state::ConstantAccelerationAndTurnRate = FloatState< variable::X, variable::Y, variable::YAW, variable::XY_VELOCITY, variable::YAW_CHANGE_RATE, variable::XY_ACCELERATION > |
| A state consisting of a 2D position, CCW orientation, speed along the orientation vector, angle change rate and acceleration along the rotation vector. More... | |
| using | autoware::prediction::state::ConstantVelocityAndTurnRate = FloatState< variable::X, variable::Y, variable::YAW, variable::XY_VELOCITY, variable::YAW_CHANGE_RATE > |
| A state consisting of a 2D position, CCW orientation, speed along the orientation vector, and an orientation change rate. More... | |
Detailed Description
This file holds a collection of states that are commonly used in this package.
- Copyright
- Copyright 2021 the Autoware Foundation All rights reserved.