differential_drive_motion_model.hpp File Reference
This file defines the linear motion model. More...
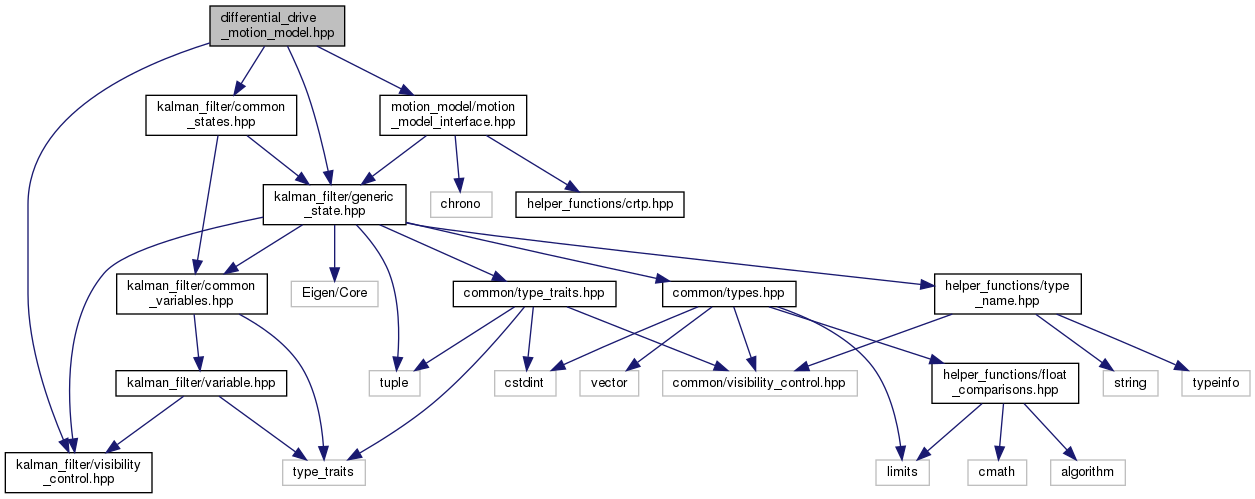
#include <kalman_filter/common_states.hpp>#include <kalman_filter/generic_state.hpp>#include <kalman_filter/visibility_control.hpp>#include <motion_model/motion_model_interface.hpp>
Include dependency graph for differential_drive_motion_model.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::prediction::DifferentialDriveMotionModel< StateT > |
| A generic differential motion model. This class only exists to be specialized for specific motion model implementations. More... | |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::prediction | |
| Functionality relating to prediction, including state estimation, kinematic prediction, maneuver-based prediction, map-aware prediction etc... | |
Typedefs | |
| using | autoware::prediction::CvtrMotionModel = DifferentialDriveMotionModel< state::ConstantVelocityAndTurnRate > |
| An alias of the differential drive motion model for the state::ConstantVelocityAndTurnRate state. More... | |
| using | autoware::prediction::CatrMotionModel = DifferentialDriveMotionModel< state::ConstantAccelerationAndTurnRate > |
| An alias of the differential drive motion model for the state::ConstantAccelerationAndTurnRate state. More... | |
Detailed Description
This file defines the linear motion model.
- Copyright
- Copyright 2021 the Autoware Foundation All rights reserved.