point_cloud_map.hpp File Reference
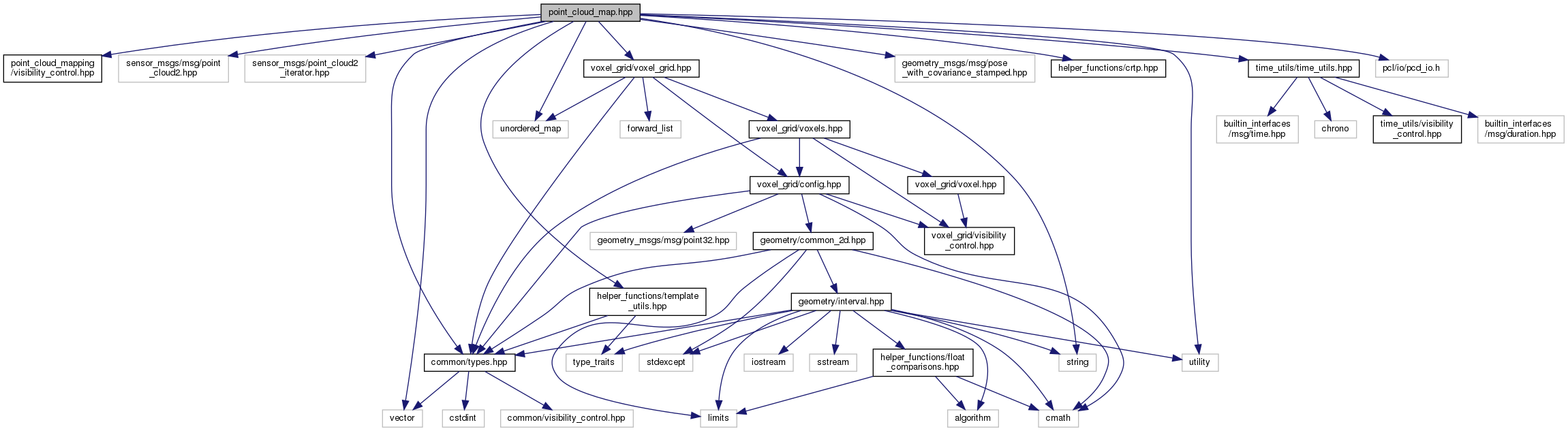
#include <point_cloud_mapping/visibility_control.hpp>#include <sensor_msgs/msg/point_cloud2.hpp>#include <sensor_msgs/point_cloud2_iterator.hpp>#include <voxel_grid/voxel_grid.hpp>#include <geometry_msgs/msg/pose_with_covariance_stamped.hpp>#include <helper_functions/crtp.hpp>#include <helper_functions/template_utils.hpp>#include <common/types.hpp>#include <time_utils/time_utils.hpp>#include <pcl/io/pcd_io.h>#include <vector>#include <string>#include <unordered_map>#include <utility>
Include dependency graph for point_cloud_map.hpp:
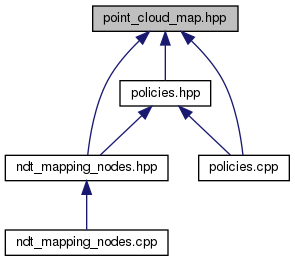
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | autoware::mapping::point_cloud_mapping::MapUpdateSummary |
| Struct containing information on the attempt to push a new observation to a map. More... | |
| struct | autoware::mapping::point_cloud_mapping::LocalizationMapConstraint< LocalizerMapT > |
This class encapsulates the static assertions that express the interface requirements of a localizer map to be able to be used with DualVoxelMap. More... | |
| class | autoware::mapping::point_cloud_mapping::DualVoxelMap< LocalizerMapT, Requires > |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::mapping | |
| autoware::mapping::point_cloud_mapping | |
Enumerations | |
| enum | autoware::mapping::point_cloud_mapping::MapUpdateType { autoware::mapping::point_cloud_mapping::MapUpdateType::NEW, autoware::mapping::point_cloud_mapping::MapUpdateType::UPDATE, autoware::mapping::point_cloud_mapping::MapUpdateType::PARTIAL_UPDATE, autoware::mapping::point_cloud_mapping::MapUpdateType::NO_CHANGE } |
| Enum representing the type of update the observation has caused in the map. More... | |
| enum | autoware::mapping::point_cloud_mapping::Requires |