data_association.hpp File Reference
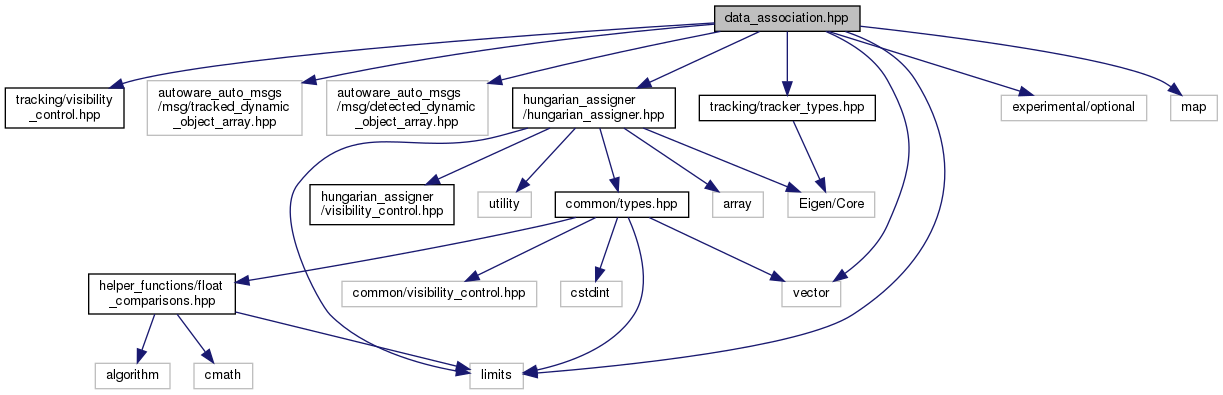
#include <tracking/visibility_control.hpp>#include <autoware_auto_msgs/msg/tracked_dynamic_object_array.hpp>#include <autoware_auto_msgs/msg/detected_dynamic_object_array.hpp>#include <hungarian_assigner/hungarian_assigner.hpp>#include <tracking/tracker_types.hpp>#include <experimental/optional>#include <limits>#include <map>#include <vector>
Include dependency graph for data_association.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::perception::tracking::DataAssociationConfig |
| Class to create configuration parameters for data association. More... | |
| struct | autoware::perception::tracking::AssociatorResult |
| Struct to store results after the assignment is done. More... | |
| class | autoware::perception::tracking::Associator |
| Class to perform data association between existing tracks and new detections using mahalanobis distance and hungarian assigner. More... | |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::perception | |
| Perception related algorithms and functionality, such as those acting on 3D lidar data, camera data, radar, or ultrasonic information. | |
| autoware::perception::tracking | |
Typedefs | |
| using | autoware::perception::tracking::assigner_idx_t = autoware::fusion::hungarian_assigner::index_t |