euclidean_cluster.hpp File Reference
This file defines the euclidean cluster algorithm for object detection. More...
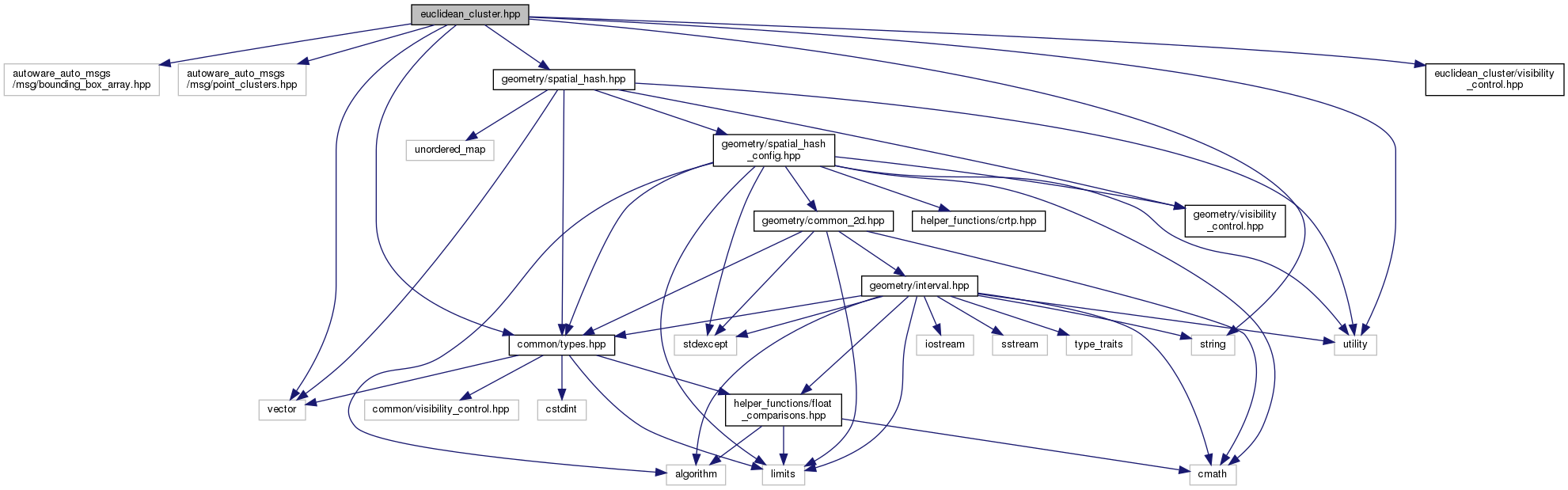
#include <autoware_auto_msgs/msg/bounding_box_array.hpp>#include <autoware_auto_msgs/msg/point_clusters.hpp>#include <geometry/spatial_hash.hpp>#include <euclidean_cluster/visibility_control.hpp>#include <common/types.hpp>#include <string>#include <vector>#include <utility>
Include dependency graph for euclidean_cluster.hpp:
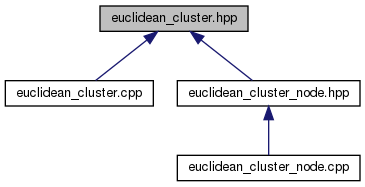
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | autoware::perception::segmentation::euclidean_cluster::PointXYZI |
| Simple point struct for memory mapping to and from PointCloud2 type. More... | |
| class | autoware::perception::segmentation::euclidean_cluster::PointXYZII |
| Helper point for which euclidean distance is computed only once. More... | |
| class | autoware::perception::segmentation::euclidean_cluster::Config |
| Configuration class for euclidean cluster In the future this can become a base class with subclasses defining different threshold functions. This configuration's threshold function currently assumes isotropy, and minor details in the clustering implementation also assume this property. More... | |
| class | autoware::perception::segmentation::euclidean_cluster::EuclideanCluster |
| implementation of euclidean clustering for point cloud segmentation This clas implicitly projects points onto a 2D (x-y) plane, and segments according to euclidean distance. This can be thought of as a graph-based approach where points are vertices and edges are defined by euclidean distance The input to this should be nonground points pased through a voxel grid. More... | |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::perception | |
| Perception related algorithms and functionality, such as those acting on 3D lidar data, camera data, radar, or ultrasonic information. | |
| autoware::perception::segmentation | |
| autoware::perception::segmentation::euclidean_cluster | |
| Supporting classes for euclidean clustering, an object detection algorithm. | |
| autoware::perception::segmentation::euclidean_cluster::details | |
| Common euclidean cluster functions not intended for external use. | |
| autoware::common | |
| autoware::common::geometry | |
| autoware::common::geometry::point_adapter | |
| Temporary namespace for point adapter methods, for use with nonstandard point types. | |
Typedefs | |
| using | autoware::perception::segmentation::euclidean_cluster::HashConfig = autoware::common::geometry::spatial_hash::Config2d |
| using | autoware::perception::segmentation::euclidean_cluster::Hash = autoware::common::geometry::spatial_hash::SpatialHash2d< PointXYZII > |
| using | autoware::perception::segmentation::euclidean_cluster::Clusters = autoware_auto_msgs::msg::PointClusters |
| using | autoware::perception::segmentation::euclidean_cluster::Cluster = decltype(Clusters::clusters)::value_type |
| using | autoware::perception::segmentation::euclidean_cluster::details::BoundingBox = autoware_auto_msgs::msg::BoundingBox |
| using | autoware::perception::segmentation::euclidean_cluster::details::BoundingBoxArray = autoware_auto_msgs::msg::BoundingBoxArray |
Functions | |
| EUCLIDEAN_CLUSTER_PUBLIC BoundingBox | autoware::perception::segmentation::euclidean_cluster::details::compute_lfit_bounding_box (Cluster &cls) |
| Compute lfit bounding box from individual cluster. More... | |
| EUCLIDEAN_CLUSTER_PUBLIC BoundingBox | autoware::perception::segmentation::euclidean_cluster::details::compute_eigenbox (const Cluster &cls) |
| Compute eigenbox from individual cluster. More... | |
| EUCLIDEAN_CLUSTER_PUBLIC void | autoware::perception::segmentation::euclidean_cluster::details::compute_lfit_bounding_boxes (Clusters &clusters, BoundingBoxArray &boxes) |
| Compute lfit bounding boxes from clusters. More... | |
| EUCLIDEAN_CLUSTER_PUBLIC void | autoware::perception::segmentation::euclidean_cluster::details::compute_lfit_bounding_boxes_with_z (Clusters &clusters, BoundingBoxArray &boxes) |
| Compute lfit bounding boxes from clusters, including z coordinate. More... | |
| EUCLIDEAN_CLUSTER_PUBLIC void | autoware::perception::segmentation::euclidean_cluster::details::compute_eigenboxes (const Clusters &clusters, BoundingBoxArray &boxes) |
| Compute eigenboxes from clusters. More... | |
| EUCLIDEAN_CLUSTER_PUBLIC void | autoware::perception::segmentation::euclidean_cluster::details::compute_eigenboxes_with_z (const Clusters &clusters, BoundingBoxArray &boxes) |
| Compute eigenboxes from clusters, including z coordinate. More... | |
| template<> | |
| EUCLIDEAN_CLUSTER_PUBLIC auto | autoware::common::geometry::point_adapter::x_ (const perception::segmentation::euclidean_cluster::PointXYZII &pt) |
| template<> | |
| EUCLIDEAN_CLUSTER_PUBLIC auto | autoware::common::geometry::point_adapter::y_ (const perception::segmentation::euclidean_cluster::PointXYZII &pt) |
| template<> | |
| EUCLIDEAN_CLUSTER_PUBLIC auto | autoware::common::geometry::point_adapter::z_ (const perception::segmentation::euclidean_cluster::PointXYZII &pt) |
Detailed Description
This file defines the euclidean cluster algorithm for object detection.